http://www.turtlebot.com/
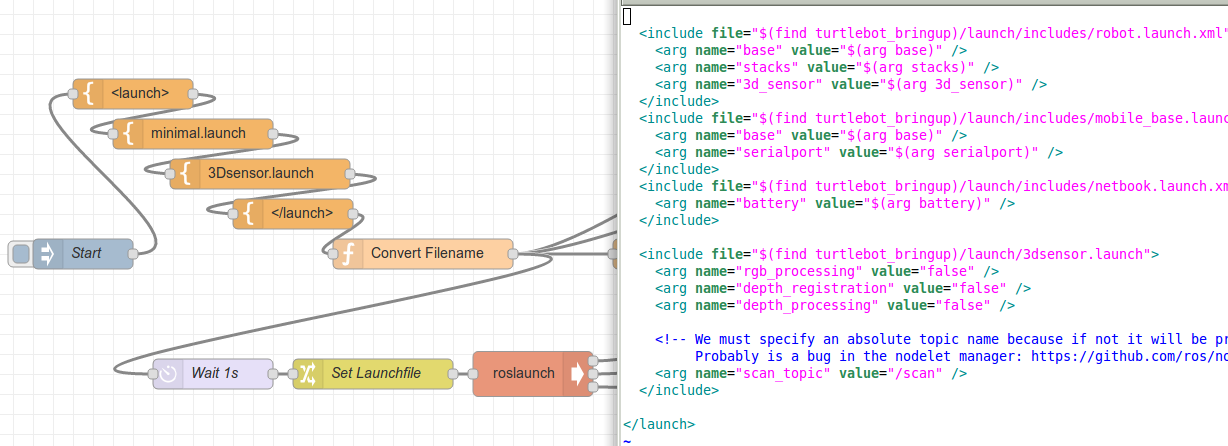
ROS and Node-RED Part 3: Managing ROS launch configurations
Once you start using ROS you will have to write launch files that combine a set of ROS nodes to a meaningful robot runtime configuration. […]
http://www.turtlebot.com/
Once you start using ROS you will have to write launch files that combine a set of ROS nodes to a meaningful robot runtime configuration. […]
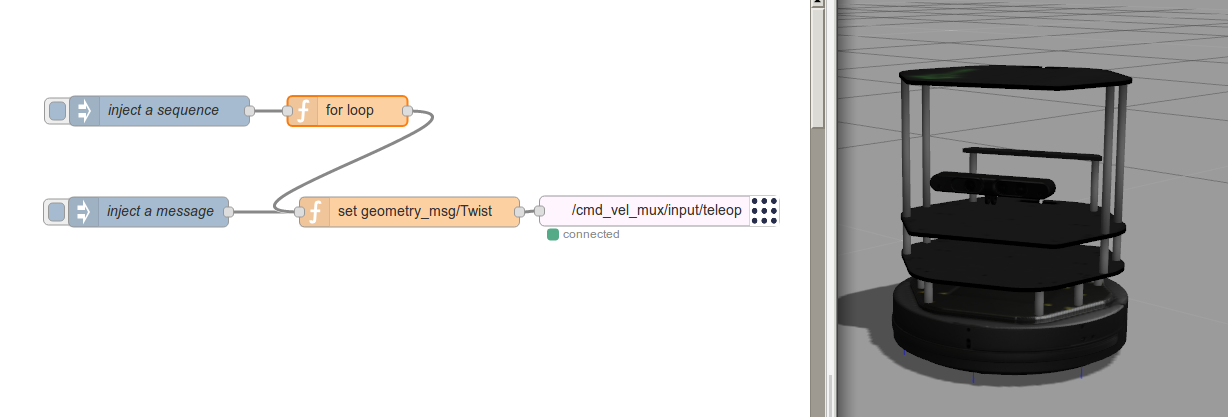
In this second tutorial, we are going to learn how to publish drive commands the a ROS robot from Node-RED. To do so, we need […]
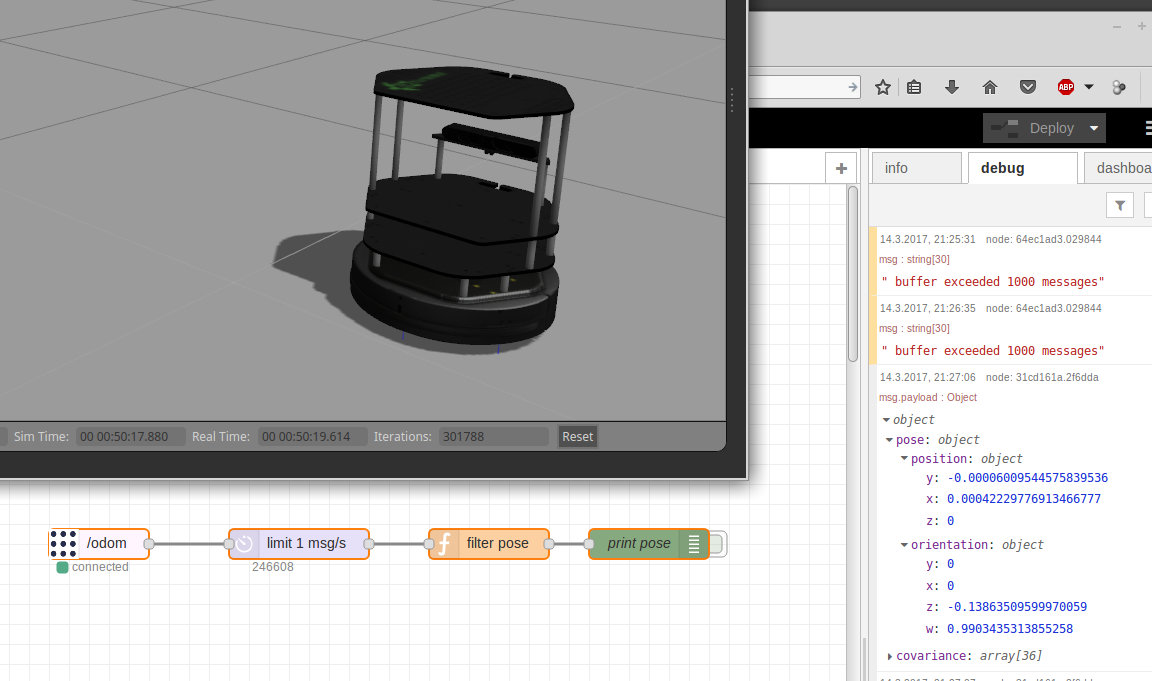
I started to discover the power of wiring tasks in Node-RED recently. Since I am a passionate ROS programmer, I was wondering if this flow […]
Copyright © 2026 | WordPress Theme by MH Themes